Having great passion towards autonomous vehicles and unmanned aerial systems (UAS), my final year research project was “Automated remote monitoring of a large-scale Plantation that is located geographically far away from the people who want to monitor it, using an Autonomous Quad-copter Drone”.
Our(3 member group) Unmanned Aerial System project is highly appreciated by Electrical and Computing department and I have ended up in good academic records with GPA of 3.66-91% (out of 4.0).
Abstract:
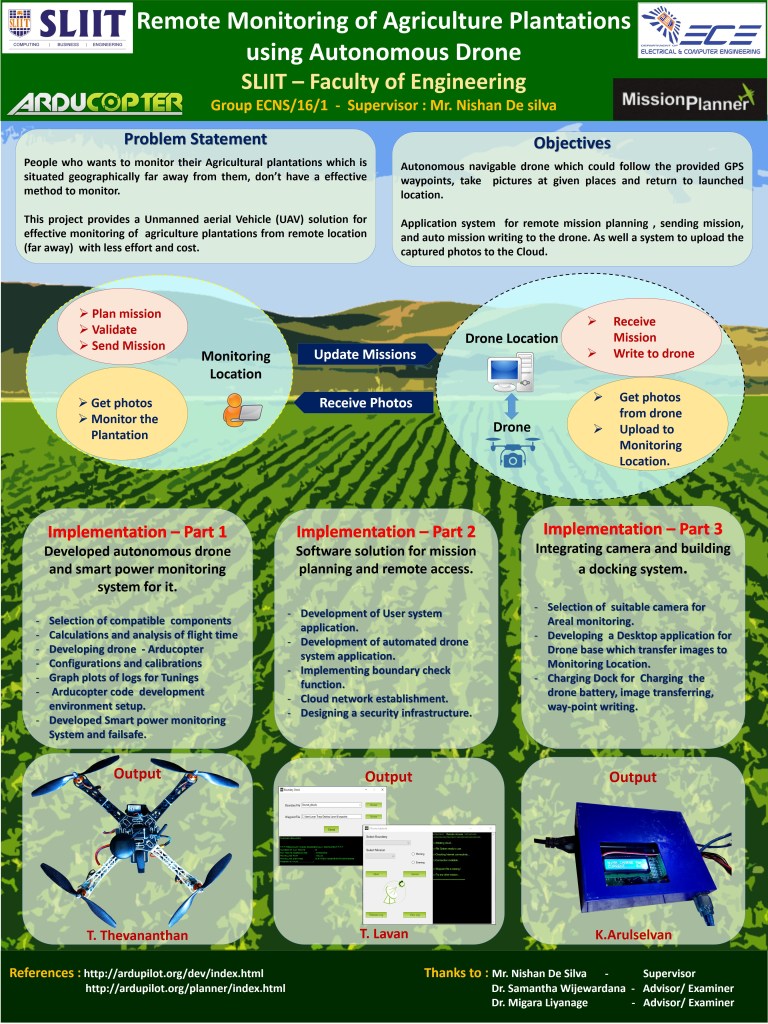
Agriculture sector is getting adapted to new technologies by automating the tasks in the productions and processing to increase the productivity and the efficiency. When considering large scale Agriculture plantations like tea, sugar estates, paddy fields, corn fields needs regular supervision for the quality production. But normally the owners of those plantations used to be in cities for business purposes, so they need a trusted and efficient supervision so that they can monitor their plantations daily on a customizable schedule. So this project deals with the solution for that by developing an automated unmanned Aerial system that could take photos of the estate all over or specially preferred places, along a assigned GPS waypoints. This routine can be executed daily according to the schedule planned by the monitoring location user. After completing the planned mission the photos captured are sent back to him through cloud in such a way that he could daily checks the photos and able to monitor his estate more efficiently.
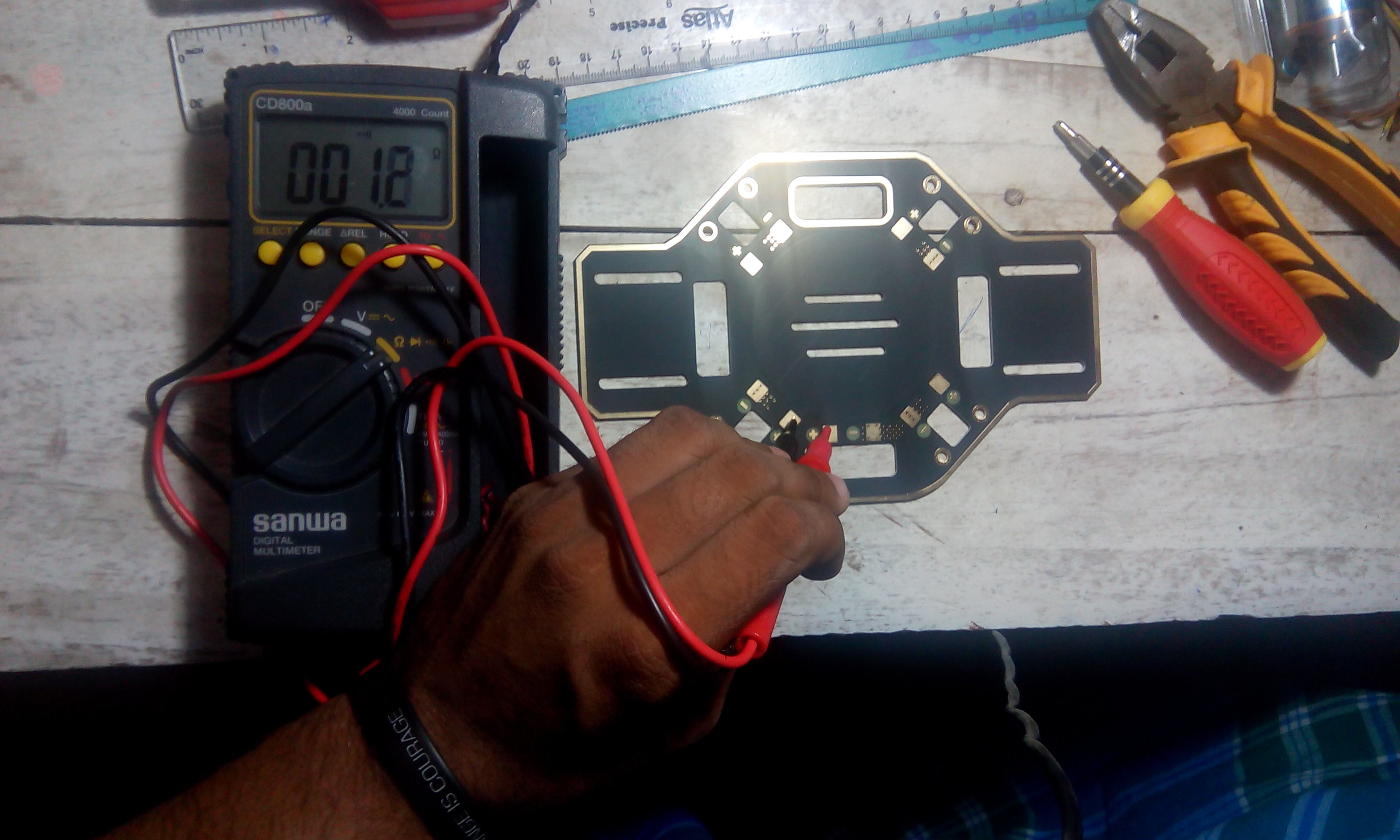
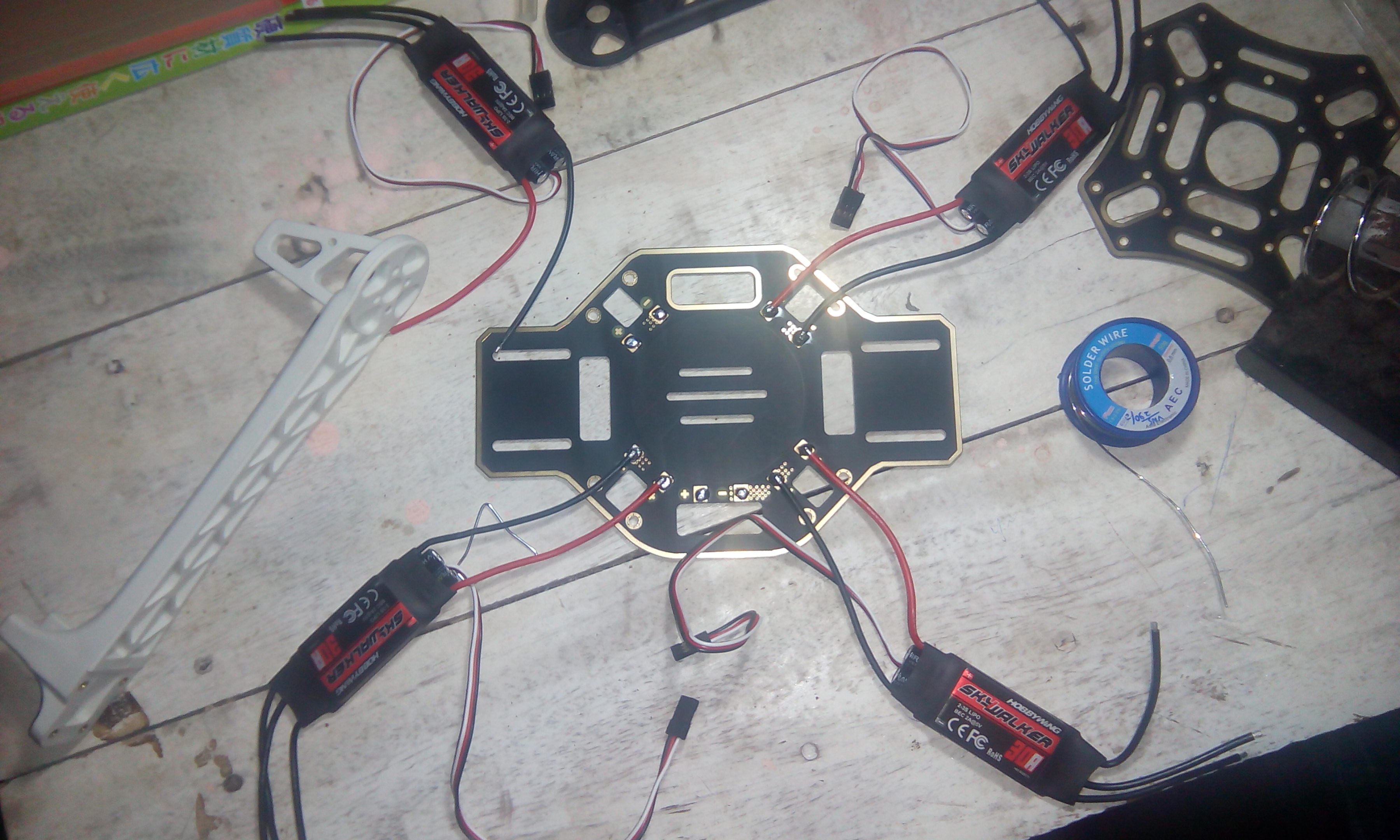
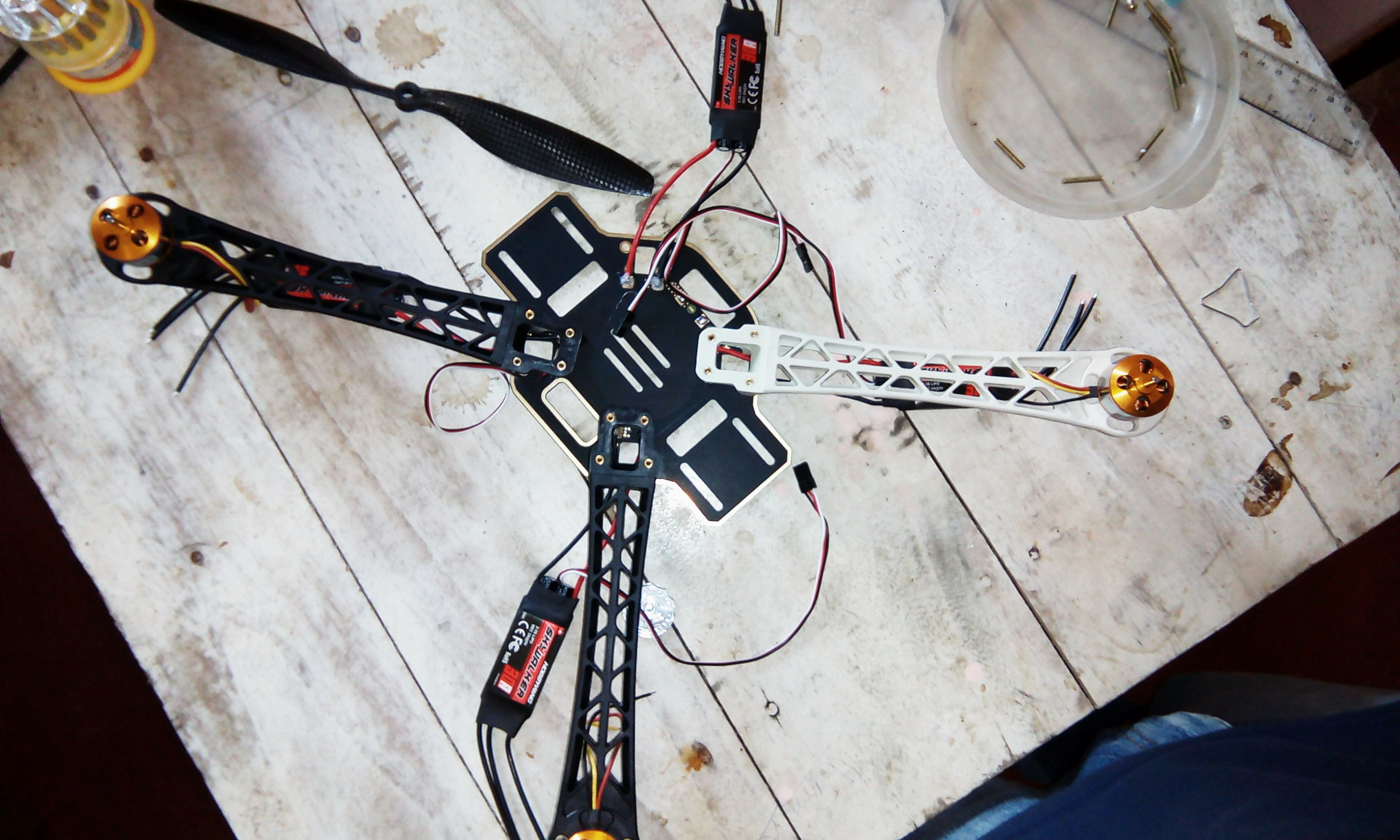
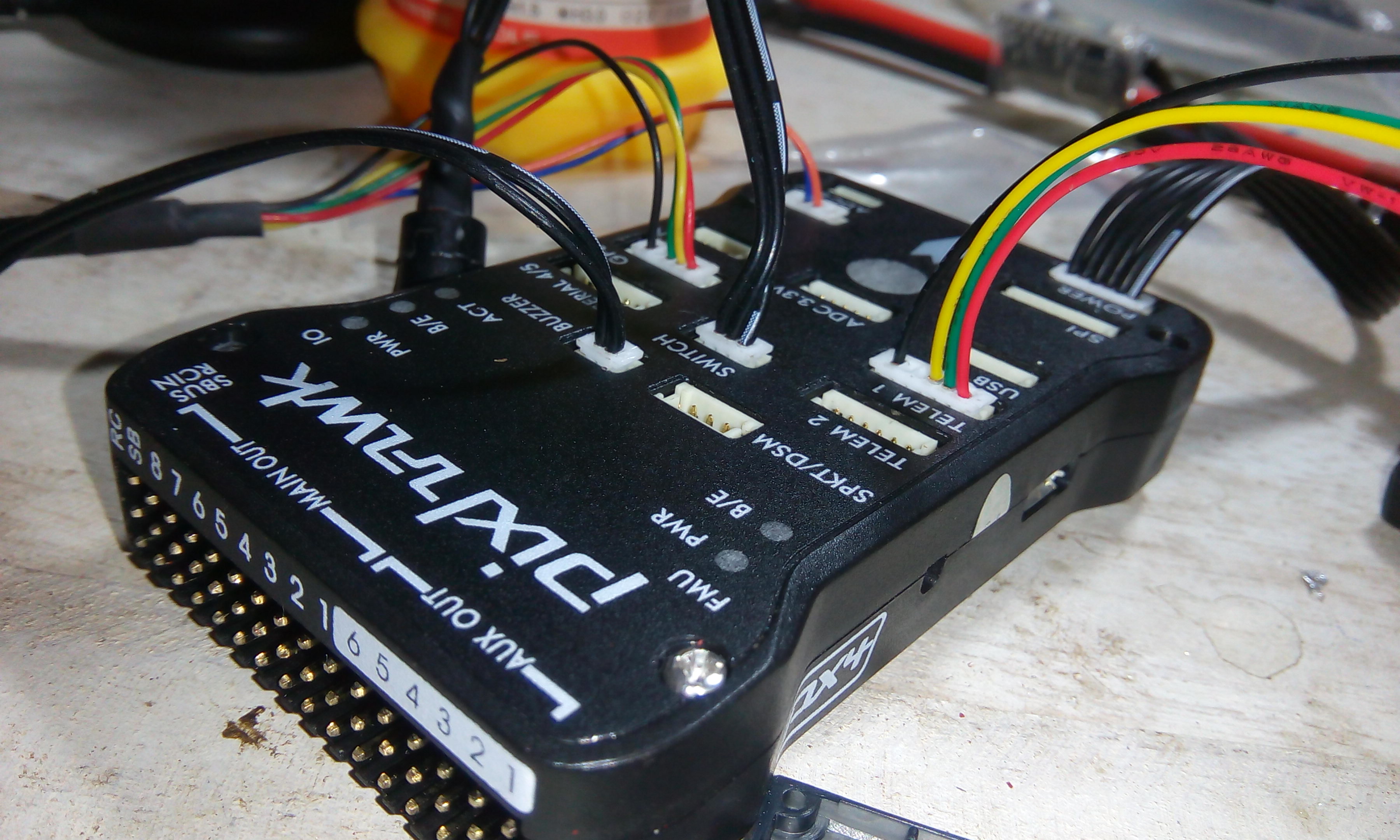
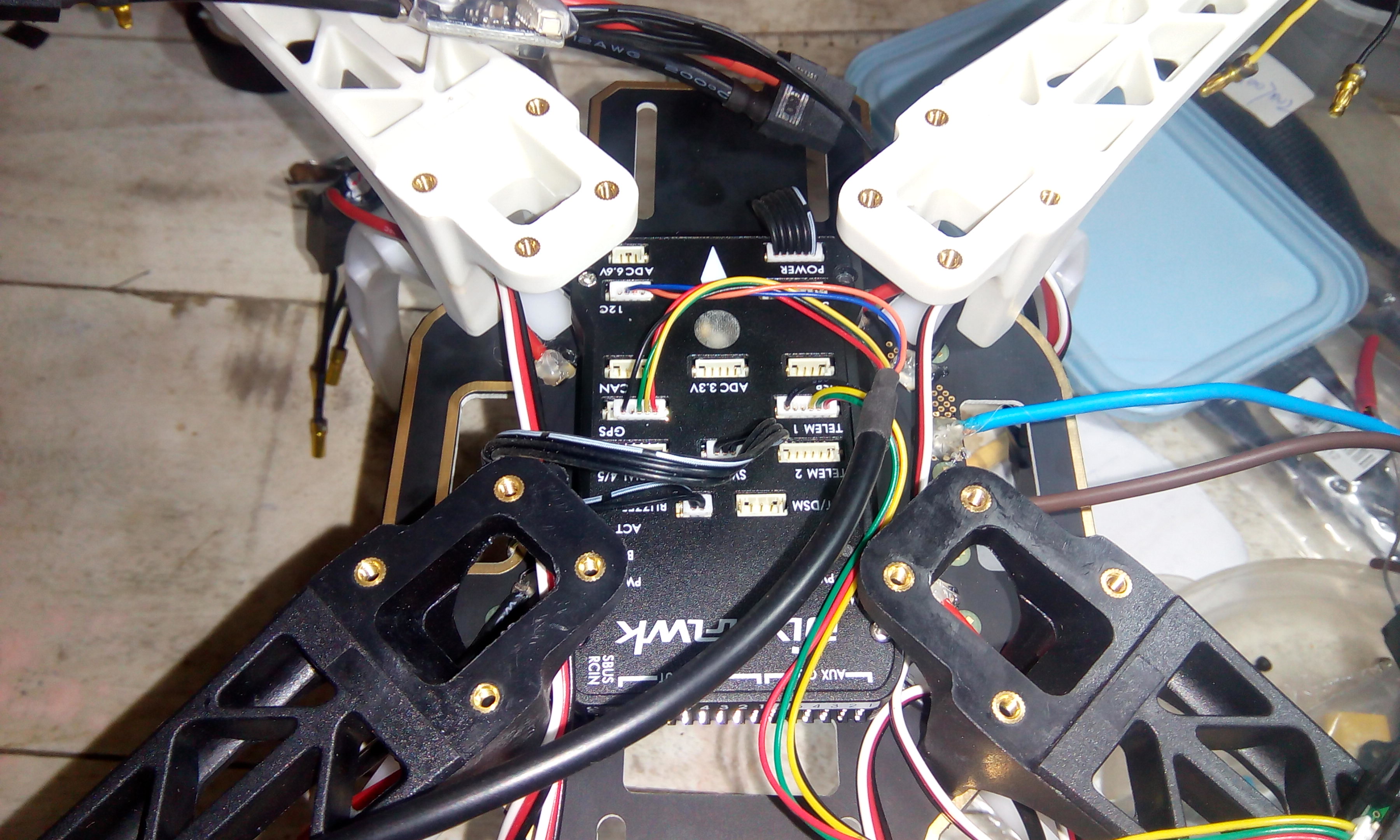
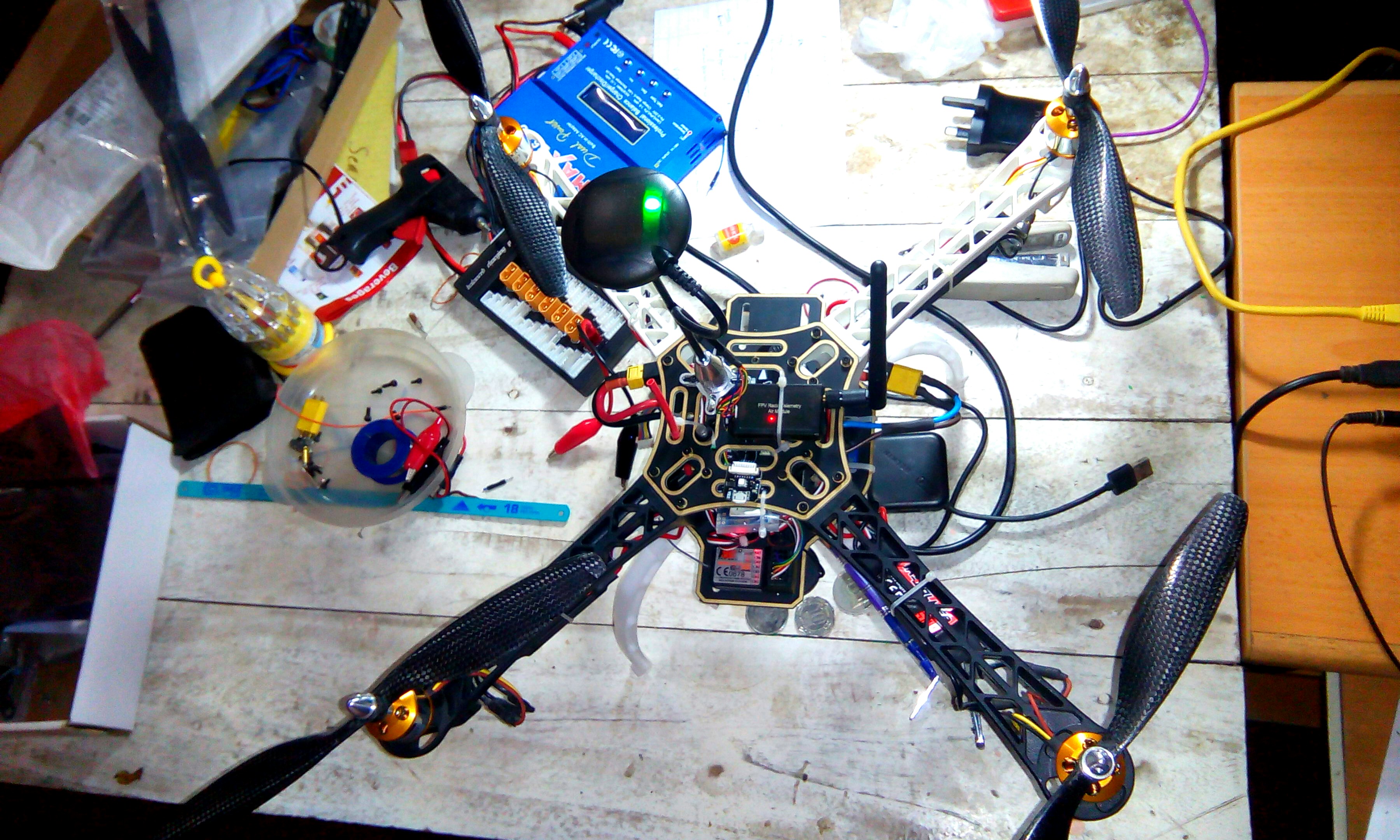
The work for the collective project objective is split into three, the tasks falls under my part was to Build and develop a Quad-copter with all control components and selected hardware (control system board, GPS compass modules, telemetry radios, frame, Battery and needed peripherals), Analyzing its performance through graphs, Tuning its performance for the needed level, Configuring the copter with the ability to Navigate through the assigned GPS waypoints using the ‘Ardupilot’ open source. Then the next task is to develop a Smart power management system with failsafe options. This smart power monitoring system was implemented by adding the developed C++ code files to the Ardupilot source code and also by making some modifications to the Arducopter main classes and some parameter classes
Making Photos